
"mixed_mode_sparam.sqn" はsonnet professionalでグラフ表示に使用できるパラメータの定義式を含んでいます. この定義式は4ポートデバイスのcommonとdifferentialのそれぞれと互いのモードのSパラメータを定義しています. この定義式をsonnetで利用する方法について説明します.
背景
回路の高速化、エネルギー効率、そしてEMC問題などの事情から、回路のdifferentialとcommonの両方のモードに対する応答を把握しなければならないことが増えてきました.これら二つのモードに対する回路の振る舞いを完全に表現する方法としてmixed モードsパラメータと呼ばれる方法がよく用いられます.ここで説明するmixedモードSパラメータ定義ファイルを使うとSonnetのresponse viewerでmixedモードSパラメータを表示させることができます.制限
この定義式は4ポートデバイスに対してのみ正しいです. 第一のポート対は1と3、そして第二のポート対は2と4でなくてはなりません. このときポート対1はsonnetのポート1と3を、ポート対2はsonnetのポート2と4を意味することになります.定義パラメータ
入力側と出力側それぞれにおけるcommonとdifferentialそれぞれのモードを組み合わせで、16のパラメータが次のように定義されます.| SDD11 | SDD12 | SDD21 | SDD22 | Differentialモード入力-Differentialモード出力 |
|---|---|---|---|---|
| SDC11 | SDC12 | SDC21 | SDC22 | Commonモード入力-Differentialモード出力 |
| SCD11 | SCD12 | SCD21 | SCD22 | Differentialモード入力-Commonモード出力 |
| SCC11 | SCC12 | SCC21 | SCC22 | Commonモード入力-Commonモード出力 |
例えば、ポート対1(port1,3)にdifferentialモードで入力したときに、 ポート対2(port2,4)に現れるcommonモード出力は SCD21で、 ポート対1(port1,3)に反射して戻ってくるcommonモード成分は SCD11となります.
このequation fileでは、これらの値をdBで計算しています. もし、位相情報が必要ならば、これらの定義式を修正する必要があります.
例題
例題として、 nobend.son と bend.son の二つのモデルを用意してあります. nobend.sonは対称なのでdifferentialモードの入力に対してcommonモードの出力は現れません. bend.sonは非対称なので、入力されたdifferentialモードの一部はcommonモードとなって現れるはずです. differentialモードの入力に対するcommonモードの出力を示すパラメータは 上の表から、SCD21です.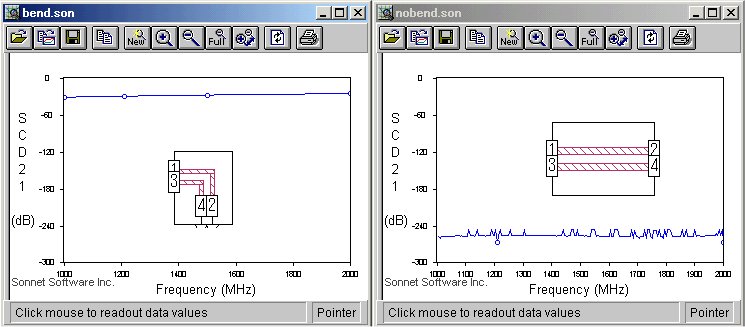
操作
それでは、次にこれらのパラメータをsonnetのresponse viewerでどうやって使うかを説明します.
- まず、4ポートデバイスのモデルを作らなくてはなりません.
- そして上で説明したようにポート番号を設定してください.
- そして、モデルを解析します.
- 解析が終わったら response viewerを起動してください.
- response viewerのメニューでEquation->Manage Equationsを選んでください. "Equation Management"というダイアログボックスが開きます.
- このダイアログボックスのUser Equation Fileの下の"Open"ボタンを押してください.
- "mixed_mode_sparam.sqn" のあるディレクトリを探して、ファイルをロードしてください.これで、上記の定義式がresponse viewerの中で有効になりました.
- Closeボタンを押してEquation Managementダイアログボックスを閉じてください.
- 最後に Equation->Add Equation Curveを選んで適当な定義式でプロットしてみましょう. Add Equation Curveダイアログボックスが現れます.
- ここで、ドロップリストから必要な定義式(たとえばSCD21)を選んでOKを押してください.